Notice:
- les "vidéos" sont des gifs animés. Si vous utilisez le navigateur Firefox, on conseille d'installer le plugin "Toggle animated GIFs" et d'utiliser les touches:
- "Shift+M": pour recommencer la vidéo
- "Ctrl+M": pour stopper/continuer la vidéo.
- (Pour plus de fluidité, vous pouvez sauver l'image animée (gif) sur votre ordinateur et la visualiser ensuite avec Firefox. Pour plus d'options, vous pouvez utiliser le logiciel "Xanim" qui permet de visualiser la vidéo "gif animated" sur votre ordi et pouvoir changer la vitesse de lecture.)
- Les animations en été crée avec un programme en C++. Si vous souhaitez utiliser/modifier ces programmes voici les codes source.
Chapter 1
Introduction
La
question fondamentale en théorie des systèmes dynamiques est:
“Connaissant les lois d'évolution infinitésimale, prévoir le comportement effectif à temps longs?”
L'homme s'interroge sur cette question depuis la nuit des temps. Les premières réponses sont venues avec le mouvement des astres car assez simple et donc prévisible (les 7 objets célestes visibles: lune (lundi), mars (mardi), mercure (mercredi), jupiter (jeudi), venus (vendredi), saturne (samedi), soleil (dimanche)).
Illustration de cette question avec quatre séries d'exemples:
- Le pendule amorti et ses variantes. On introduit la section de Poincaré qui est une application de dimension 1 monotone donc régulière.
- L'application logistique (qui est une application de dimension 1 mais non monotone donc présentant du chaos), et l'ensemble fractal de Mandelbrot qui est son diagramme de phase.
- Le billard rectangulaire qui a une dynamique très simple et le billard de Sinaï qui a une dynamique très chaotique. On observe que le hasard émerge de lois déterministes.
- La réaction chimique de Belousov-Zhabotinsky qui montre une “dynamique spatio-temporelle” avec “morphogénèse” (la dynamique converge vers un cycle limite, mais il semble y avoir du “chaos spatial”?).
On conseille vivement la lecture du livre (non technique)[D.Ruelle, “
Hasard et chaos” 1990] et la visualisation des films “
chaos” de Etienne Ghys et al.
Références:
- Livre de Strogatz, “Nonlinear Dynamics and Chaos”
- Livre de Cross et al. “Pattern formation”.
1.1 Modèle du pendule
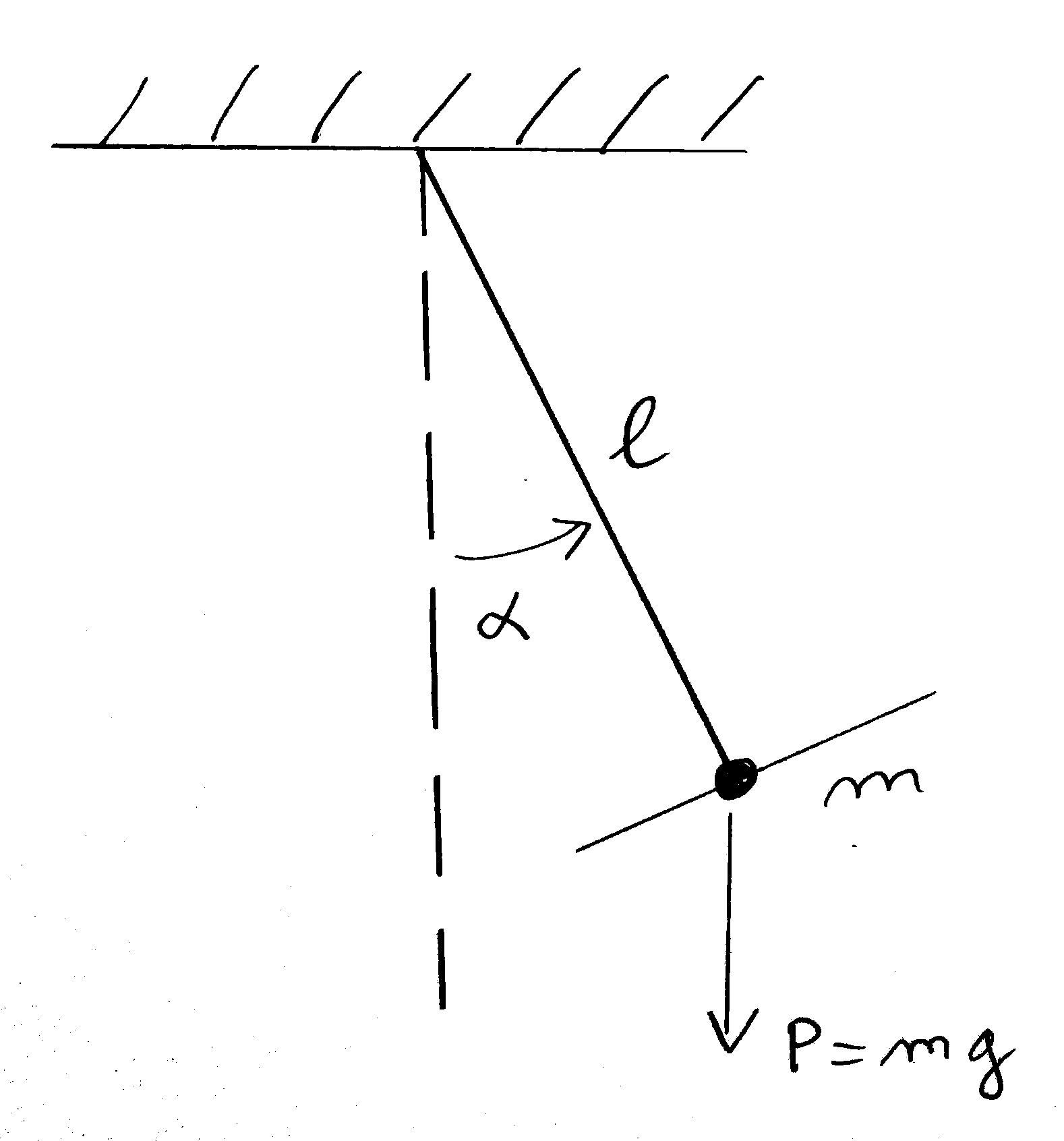
Le pendule est le paradigme du système mécanique simple et prévisible.
Masse ponctuelle
attachée à une tige rigide de longueur fixe
dans un plan vertical
. La masse est soumise à son poids
et une force de frottement
opposée à la vitesse
, avec
qui est le coefficient de frottement.
1.1.1 Equation de mouvement de Newton (1687)
La
position curviligne du pendule est
. La
loi de Newton (
) donne:
Il est préférable d'avoir des équations du premier ordre en temps. Posons
Donc
c'est une
équation différentielle ordinaire (E.D.O).
Video:
Solution numérique obtenue par la “méthode d'Euler” expliquée ci-dessous. Les paramètres sont
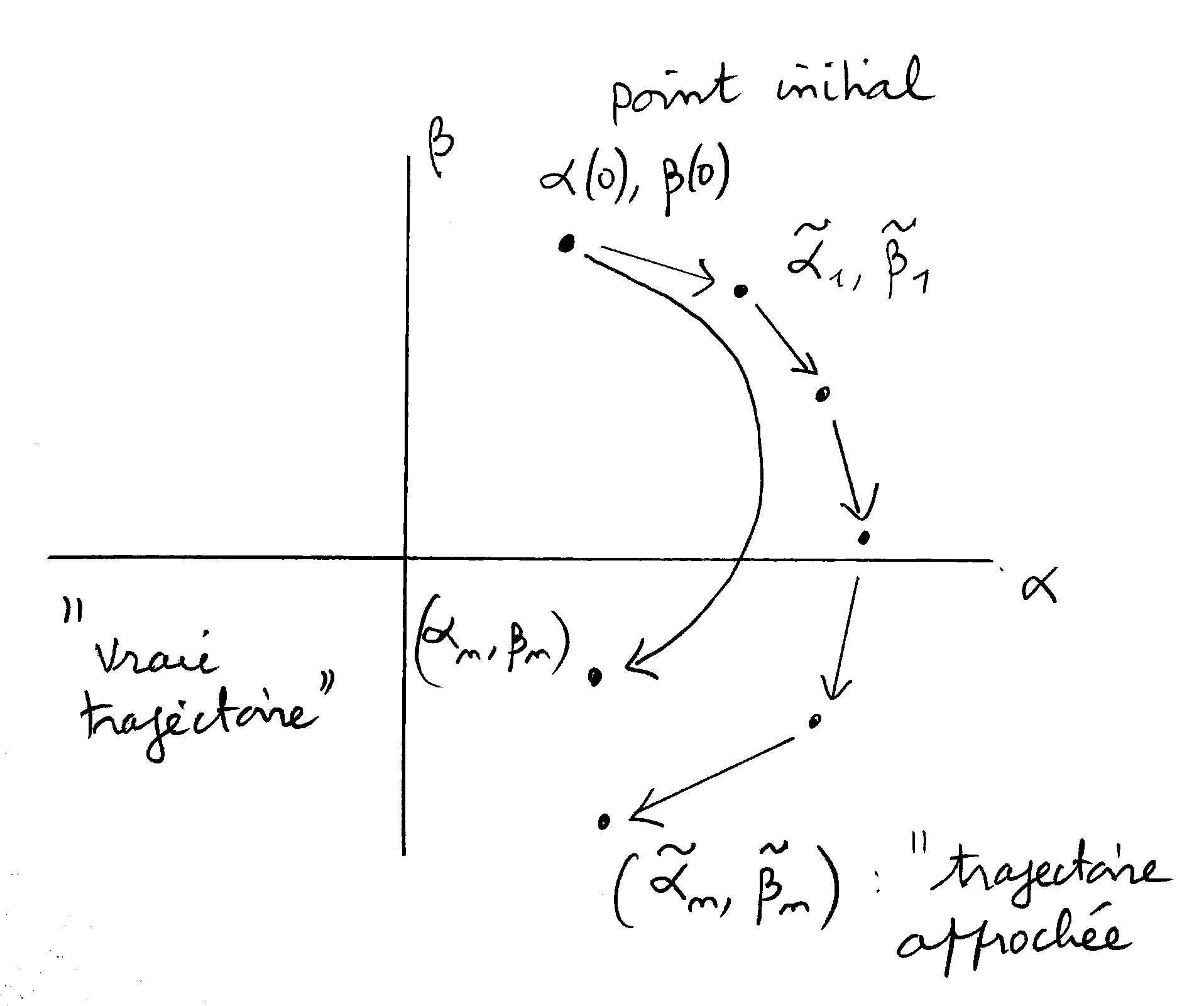
1.1.2 Résolution numérique de l'EDO (1.1.2) par la méthode de Euler (1768)
Prenons un intervalle de temps très petit
et posons
D'après la formule de Taylor à l'ordre 1:
Proposition:
“
Méthode de Euler”: On pose
et (on oublie le reste
)
Alors
est une bonne approximation de la vraie position
. En effet, l'erreur est majorée par
Remarque:
l'ODE est donc une
loi déterministe: l'état initial
détermine
pour tout temps
.
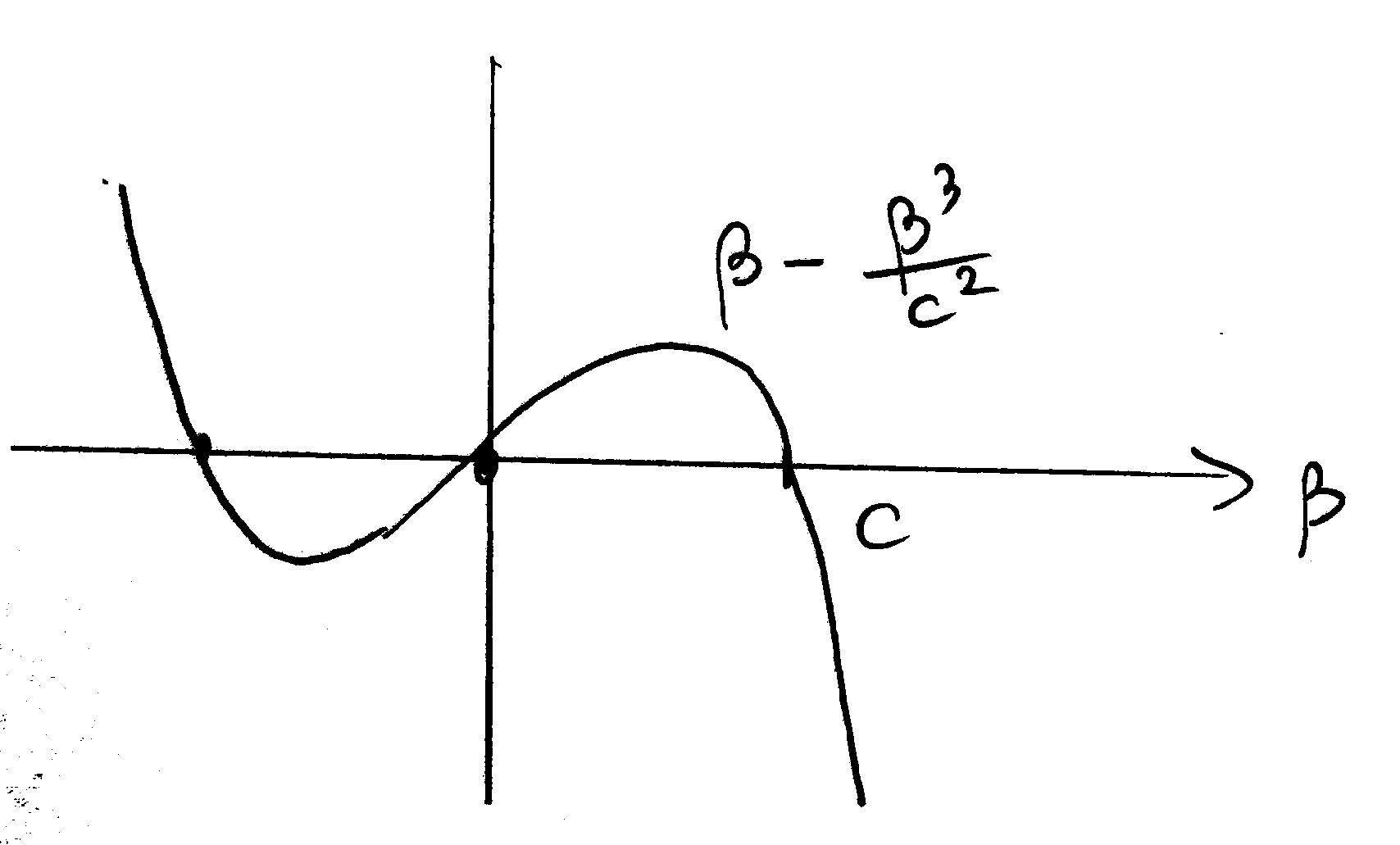
1.1.2.1 Variante: le pendule forcé (oscillateur entretenu)
On remplace le terme de frottement
par
qui est positif si
et négatif si
:
Vidéo:
Trajectoire partant de la condition initiale
. L'amplitude augmente et la trajectoire converge vers un
cycle limite (trajectoire périodique). Les paramètres sont
La trajectoire part de la condition initiale
et converge vers le même cycle limite:
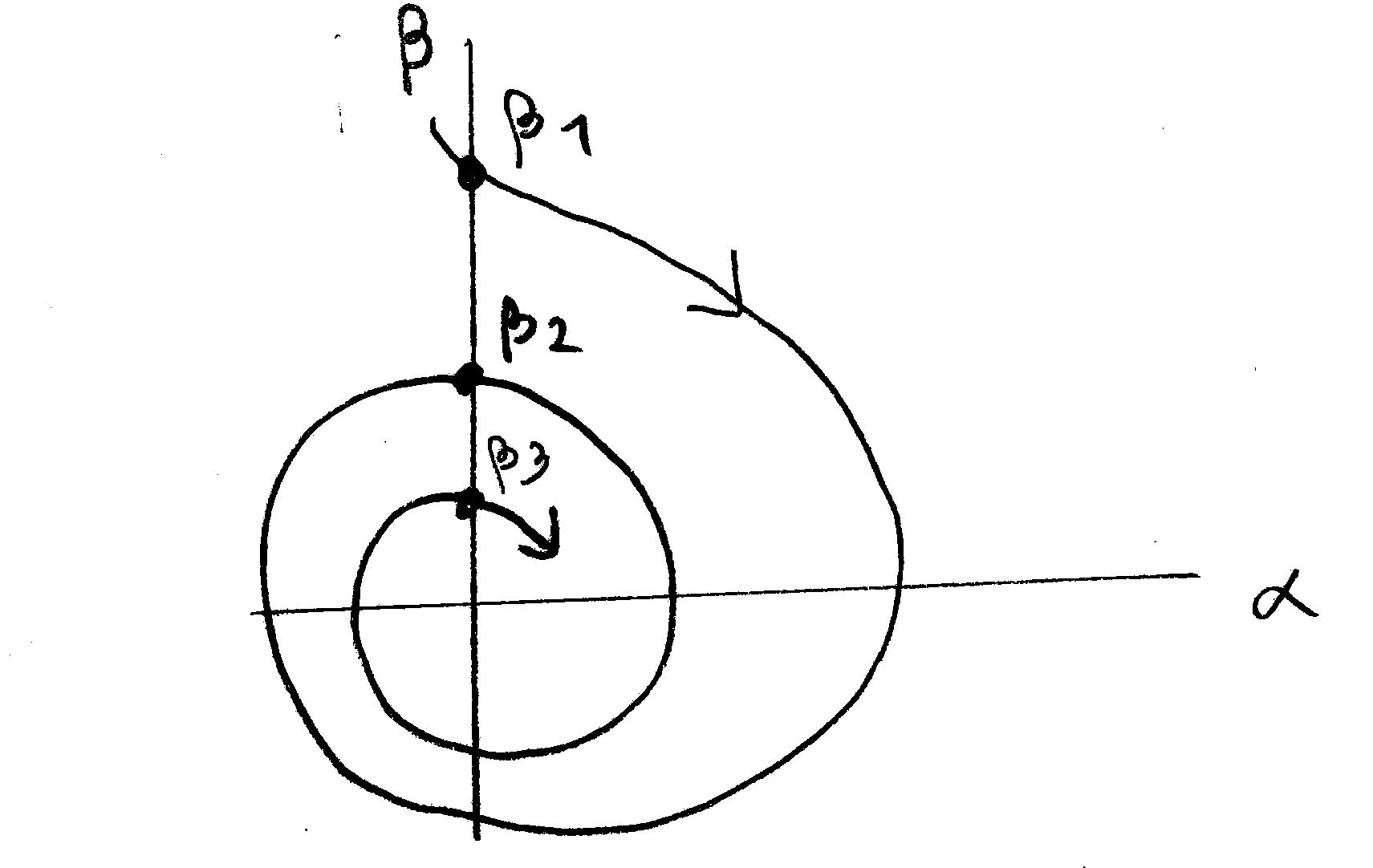
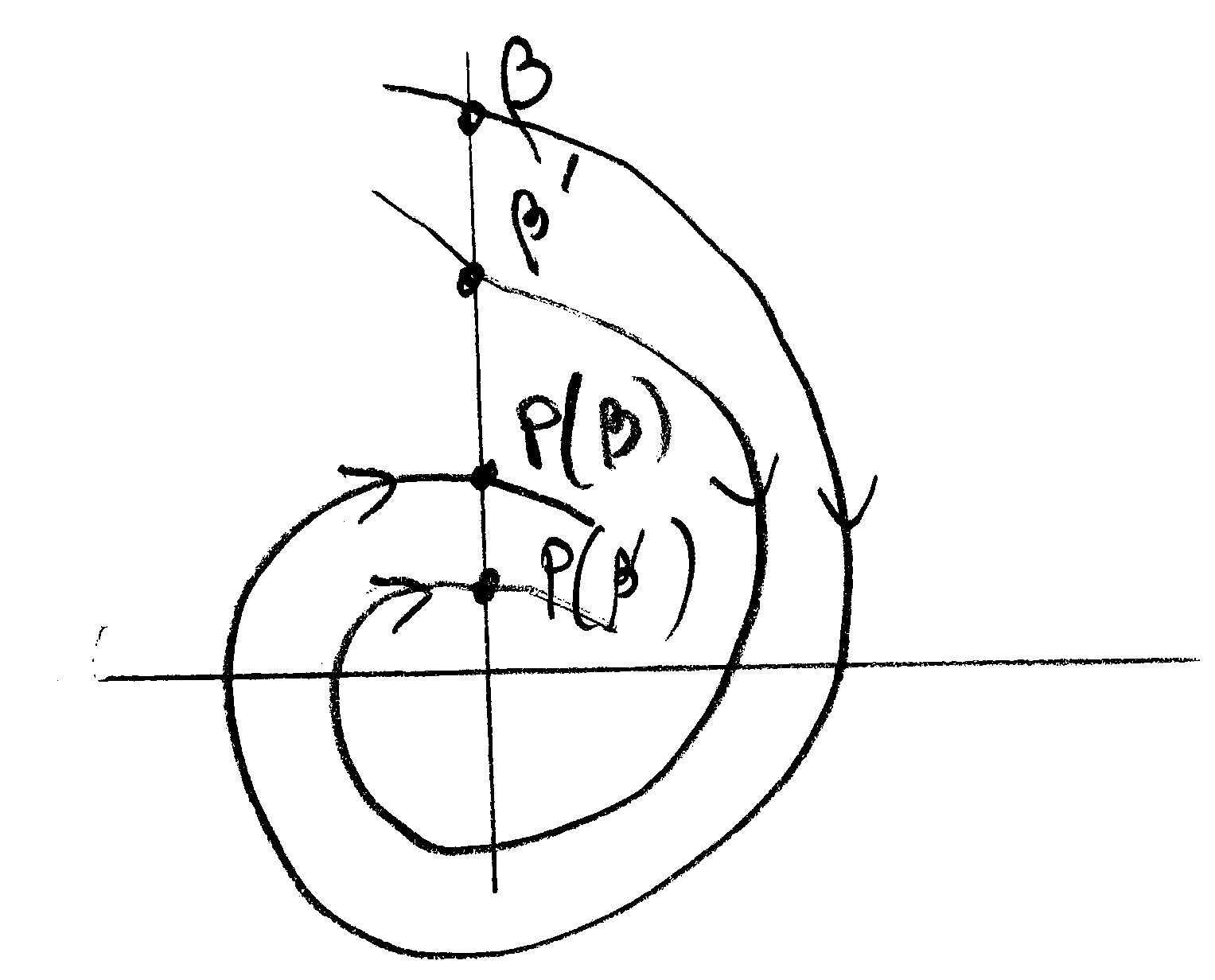
1.1.3 Section de Poincaré (1892)
Définition:
La demi droite
s'appelle la
section de Poincaré et l'application:
s'appelle l'
application de Poincaré. Remarques:
- Intérêt de l'application de Poincaré: son étude est plus simple que celle du flot. Par exemple le point fixe est un point attractif. Cette propriété est équivalente à l'existence d'un cycle limite attractif pour le flot.
- Pour le pendule, la fonction est forcément croissante, car si alors :
Ce modèle a ensuite été étudié pour ses aspects chaotiques.
En particulier son diagramme de phase appelé “
ensemble de Mandelbrot”, 1985, présenté au grand public comme « l'objet mathématique le plus complexe jamais découvert », a permis de découvrir les
“fractales”.
1.2.1 Définition
Définition:
Soit
un paramètre fixé. L'
application logistique est
Le
système dynamique associé est: partant d'une condition initiale
, on pose
Remarque:
- On dit que c'est un système dynamique de dimension 1 car il y a une variable , et “à temps discret” car les points évoluent par étapes. La loi du mouvement est simplement . C'est une loi déterministe car la valeur de à l'instant et la loi déterminent la valeur à l'instant suivant .
- La question est toujours la même: “prévoir la trajectoire pour ?”
1.2.2 Observations
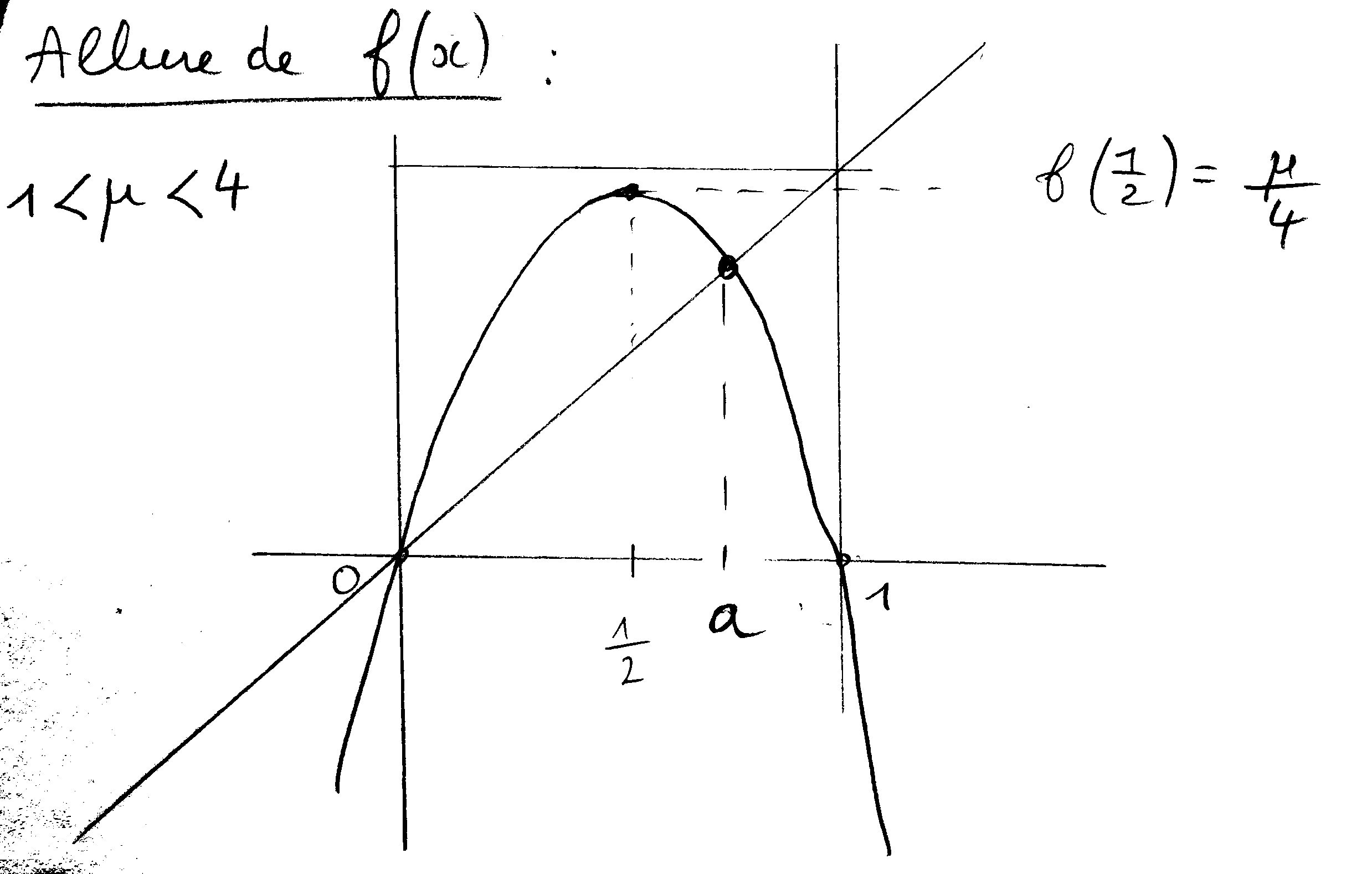
1.2.2.1 Allure de la fonction
- Les points fixes sont , et .
- On a donc .
Ainsi si
alors
donc le point fixe
est
attractif pour la dynamique de
et
donc le point fixe
est
répulsif pour la dynamique de
.
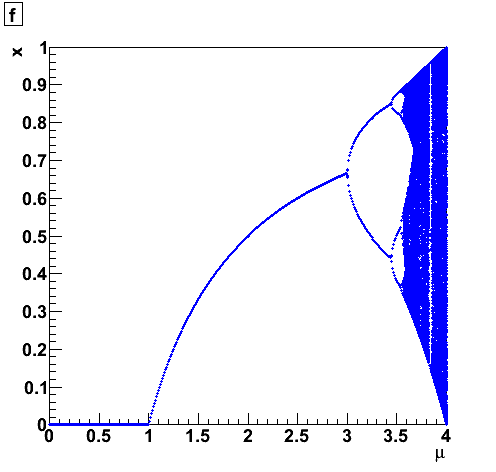
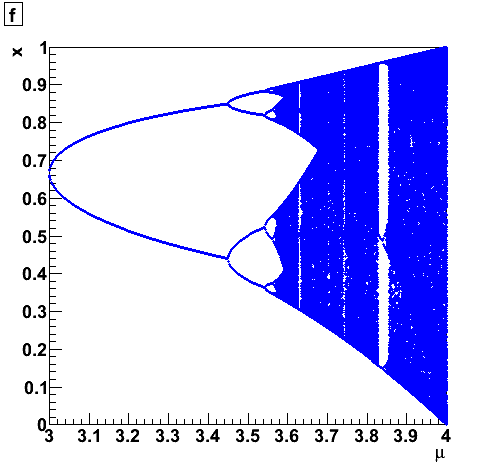
1.2.2.2 Trajectoires et ensemble attracteur de
Vidéo:
Dessin d'une trajectoire partant de
, pour différentes valeurs de
. On observe que la trajectoire converge vers un point (si
), ou une séquence de 2 points (si
) ou une séquence de 4 points (si
). Cet attracteur ne dépend pas du point initial. Pour
, la trajectoire a un comportement “chaotique” sur tout l'intervalle
.
Proposition:
- Le point est toujours un point attractif pour la dynamique de (si non nul).
- Pour l'ensemble attractif de sur est où est non vide. Pour , on montre que l'ensemble attractif de est l'unique point .
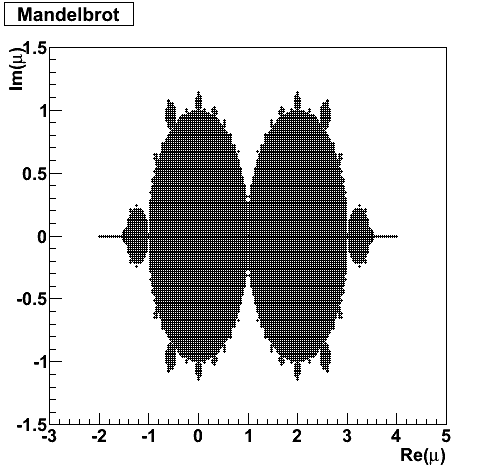
Comme
est un polynome, on peut étendre le modèle aux valeurs complexes:
On a vu que l'ensemble attractif de
est
avec
éventuellement vide.
Définition:
L'
ensemble de Mandelbrot est l'ensemble des paramètres
pour lesquels l'ensemble attractif
de
est non vide.
- Ainsi l'ensemble de Mandelbrot est un “diagramme de phase” qui montre pour quels paramètres du modèle on a un ensemble attractif limite .
- D'après la remarque ci-dessus, contient l'intervalle .
Voici une propriété pratique pour caractériser l'ensemble de Mandelbrot:
Proposition
est hors de
si et seulement si
.
Autrement dit le point
est attiré par l'ensemble attracteur
sauf si
est vide. Dans ce cas
est attiré par
. (noter que
est l'unique point vérifiant
).
- Avec le logiciel libre xaos (ou autre) on peut explorer le bord de l'ensemble de Mandelbrot qui est remarquable.
Videos:
varie sur la ligne
. ainsi on peut comparer l'ensemble attracteur (bleu) aux images précédentes.
Point bleu: ensemble attracteur de
qui n'existe que si
(point rouge) est dans l'ensemble de Mandelbrot. Point vert: ensemble répulseur de
.
Même figure mais
varie sur la ligne
:
1.3 Billard de Sinaï (1970)
Les modèles de billard sont aussi des modèles de systèmes dynamique à la fois proches de modèles physiques réalistes et relativement simples à étudier pour certains.
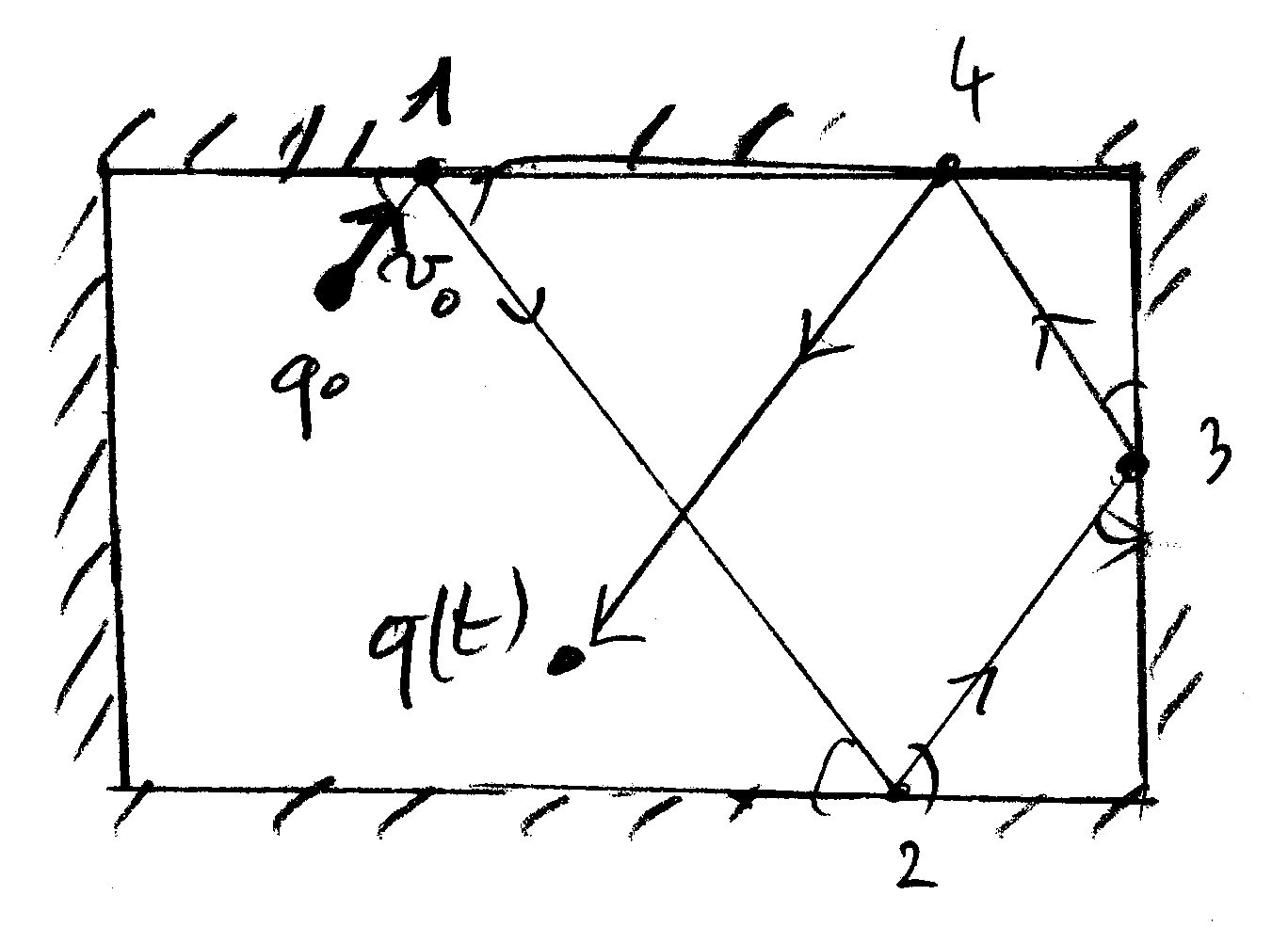
1.3.1 Le billard rectangulaire
Un point de position
et vitesse initiale
évolue dans un billard rectangulaire. La loi du mouvement est la ligne droite (vitesse constante) et rebond parfait sur les parois (c'est à dire angle de réflexion = angle d'incidence). On observe que la trajectoire dessine une figure très régulière.
Question:
étant donnés la position initiale
et la vitesse initiale
, prédire la position
et la vitesse
au temps
quelconque?
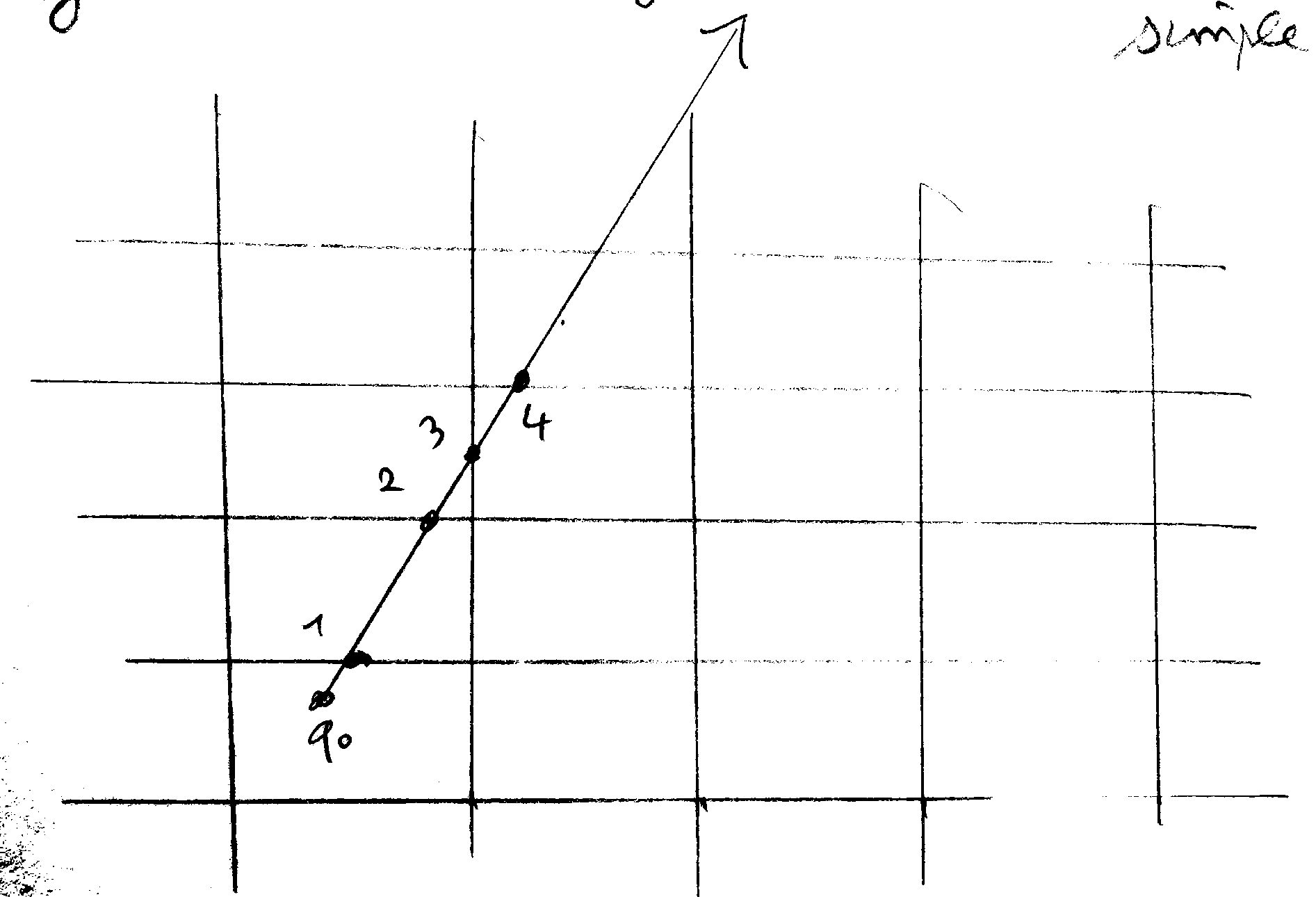
Réponse:
Par la “
méthode des images
” qui est spécifique à cette géométrie rectangulaire, le problème devient simple et soluble.
1.3.2 Billard dispersif de Sinaï
(1970)
Le billard de Sinaï est un carré avec conditions périodiques au bord (c'est donc un tore
) et contenant des disques. Une bille évolue en ligne droite à vitesse constante et rebondit parfaitement sur le bord des disques. Elle a donc un comportement déterministe. Mais on observe que le comportement est imprévisible, “chaotique”. Pourquoi?
Video:
Réponse:
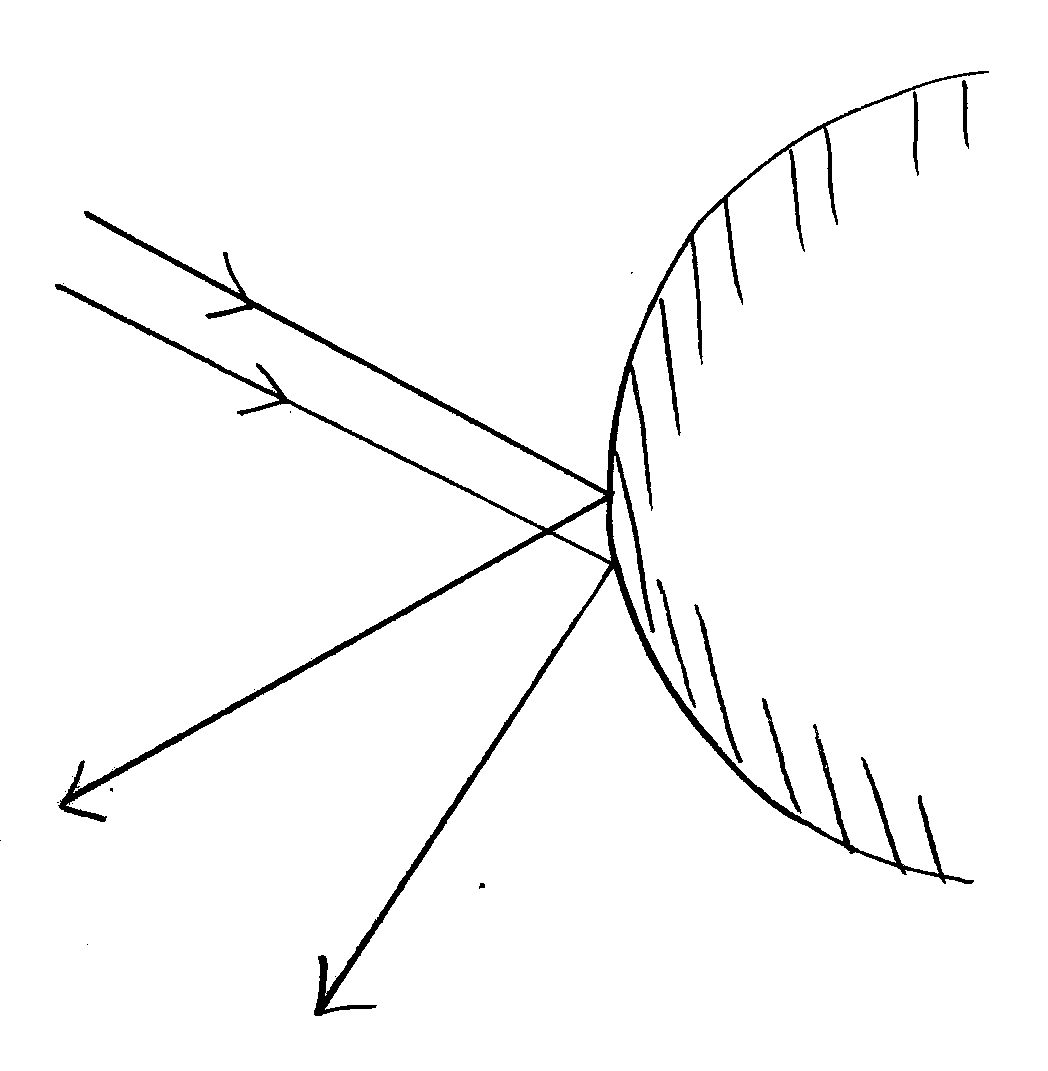
L'explication heuristique est que les bords du billard sont convexes ce qui implique une “dispersion des trajectoires” après chaque rebond:
Après quelques rebonds seulement, les deux trajectoires initialement très proches peuvent avoir des évolutions très différentes (décorrélées). Sur la figure suivante, on observe une bille avec une incertitude initiale
. Cette incertitude croit exponentiellement et le comportement peut différer après un temps très court.
La dynamique déterministe engendre donc du hasard. Cela est à l'origine du “chaos déterministe” et de la complexité dans les systèmes dynamiques, et plus généralement de la complexité en physique et dans la nature. Référence: Ruelle “Hasard et chaos” 1990.
Question:
Est-il possible de faire des prédictions sur l'évolution malgré ce hasard ? de comprendre les lois de ce hasard?
1.3.3 Approche probabiliste
Il est nécessaire d'adopter une approche probabiliste. Voici l'idée.
Observons
billes indépendantes avec des conditions initiales très proches
. La distribution des billes peut s'interpréter comme une distribution de probabilité pour la bille initiale.
La distribution des billes peut s'interpréter comme une distribution de probabilité d'une bille initiale. Cette distribution converge vers l'équilibre et diffuse sur le réseau (sur le plan). On observe un comportement
prédictible mais
irréversible. (On introduira la notion d'
entropie pour caractériser cette perte d'information sur la position de la particule au cours du temps).
Vidéos:
1.4 Dynamique spatio-temporelle
- Dans les modèles précédent, la variable qui évolue au cours du temps était un point dans un espace de dimension finie: pour le pendule, pour l'application logistique, pour le billard.
- Il est de nombreux problèmes de physique où la variable qui évolue est une fonction sur l'espace (une “onde” ou un “champ”), qui peut représenter en chimie la concentration d'un composé, en mécanique des fluide ce peut être le champ des vitesses, etc.
- En 1952 Alan Turing écrit “The Chemical Basis of Morphogenesis” pour essayer de comprendre l'émergence de formes et structures dans la nature.






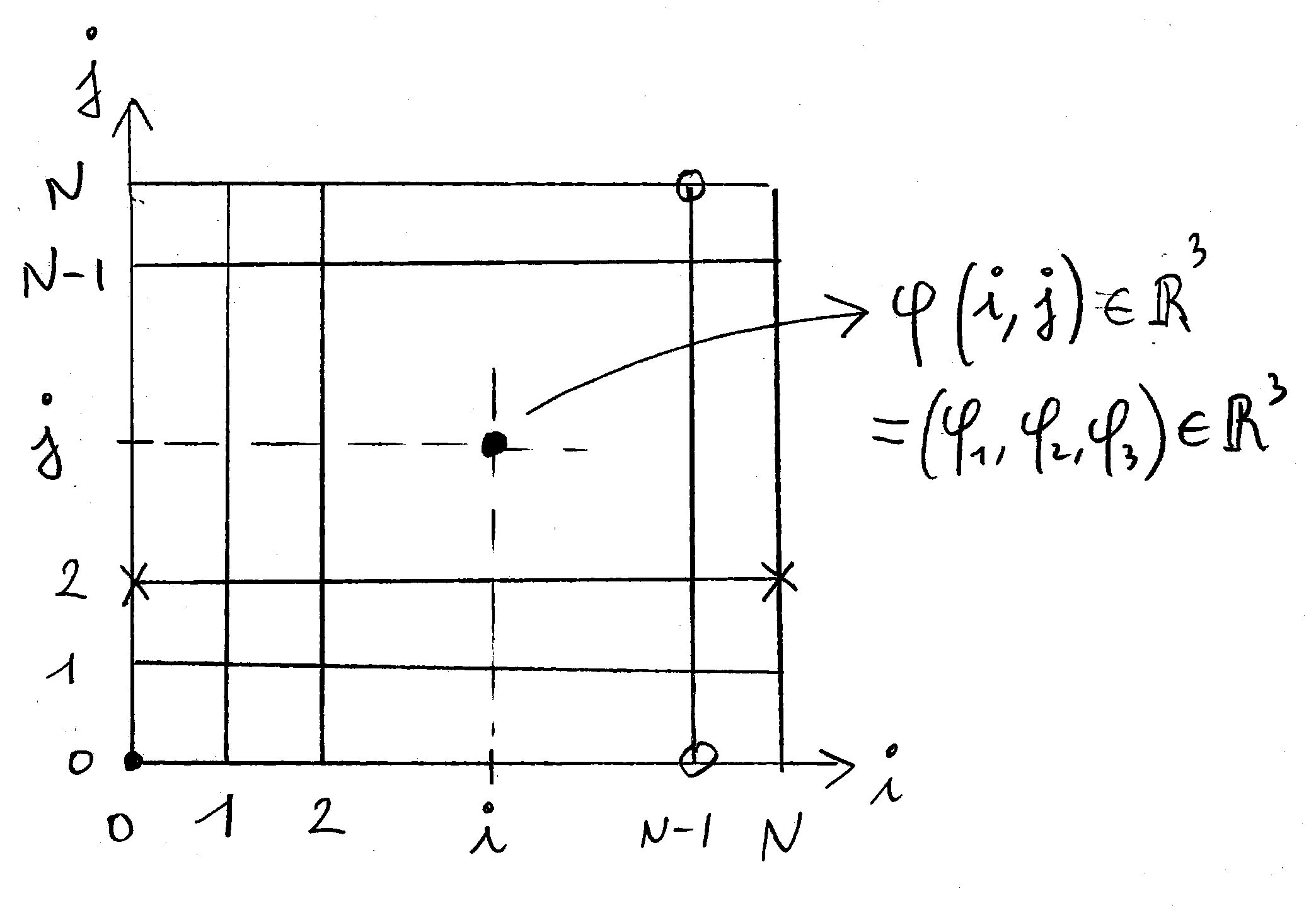
A un instant
(le temps est discret)
est une fonction à trois composantes sur le réseau
périodisé:
Pour définir
(à l'instant
) à partir de
on considère deux opérations successives:
- Moyennisation spatiale: c'est l'opération
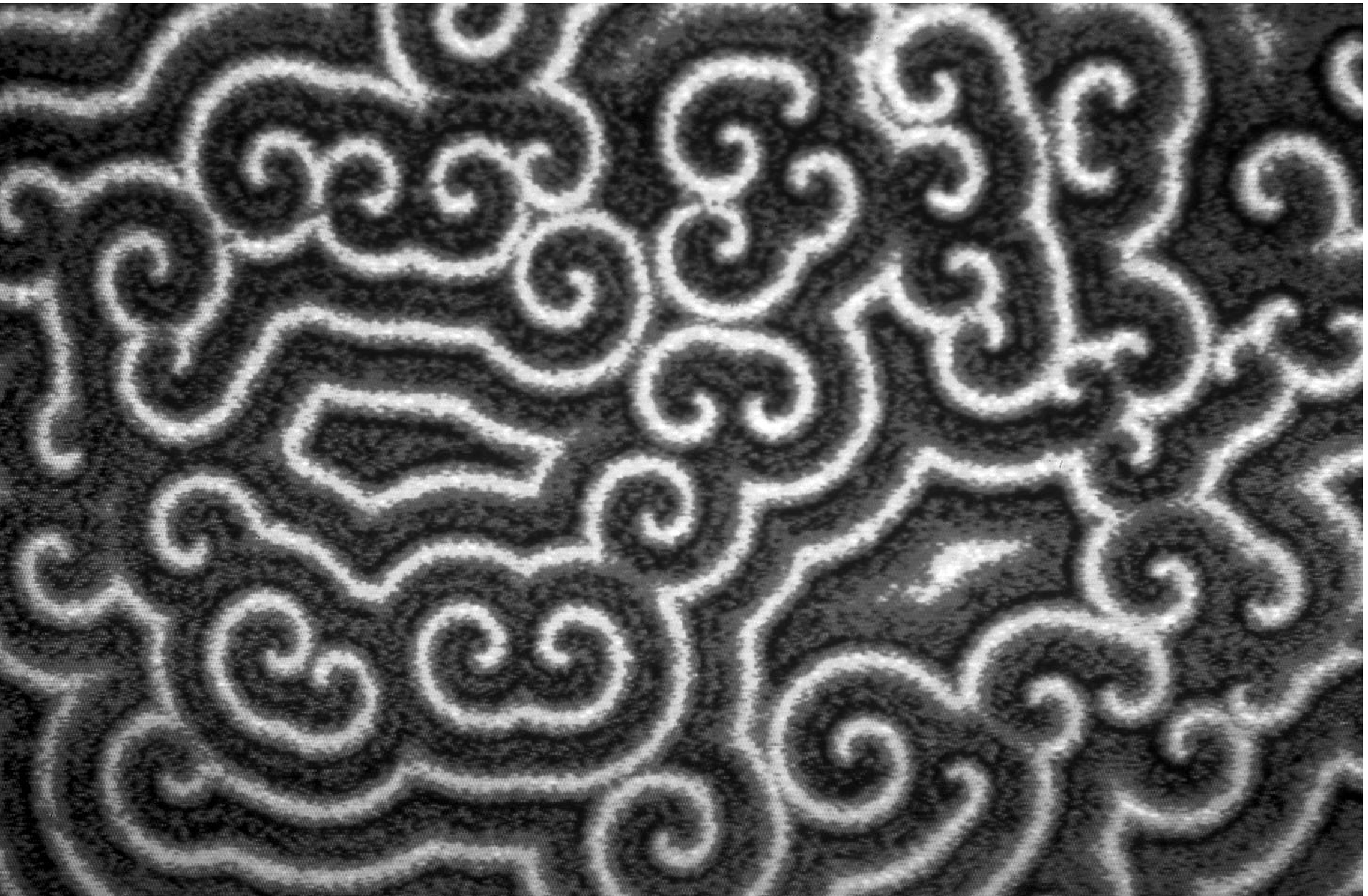
où signifie que la somme porte sur le point et ses 4 voisins proches.
- Dynamique ponctuelle sur : en chaque point du réseau, la fonction est modifiée par l'application:
et ensuite on restreint chaque valeur à l'intervalle .
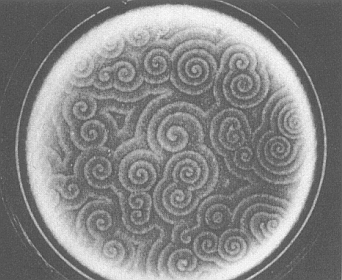
Vidéos:
Partant d'une fonction initiale
tirée au hasard, on observe une convergence vers une trajectoire périodique (cycle limite) avec une structure spatiale en spirales.
Images aux périodes
, afin de montrer la convergence vers un cycle limite:
1.4.2 Interprétation du modèle en chimie
représentent les concentrations de 3 composés. On suppose qu'il y a les 3 réactions chimiques suivantes
Dans la réaction (1) on dit que
est un
catalyseur pour la création du composé
., etc. Cela implique que à chaque étape, la variation de concentration est donnée par
donnant la loi de transformation (
1.4.2). Il y a aussi diffusion spatiale des réactifs modélisée par la formule de moyennisation spatiale (
1.4.1).